St Robotics Parallel Greifer für Roboter Elektrisch 20N

- RS Best.-Nr.:
- 124-2709
- Herst. Teile-Nr.:
- EG17
- Marke:
- St Robotics


- RS Best.-Nr.:
- 124-2709
- Herst. Teile-Nr.:
- EG17
- Marke:
- St Robotics
Mehr Infos und technische Dokumente
Rechtliche Anforderungen
- Ursprungsland:
- GB
Produktdetails
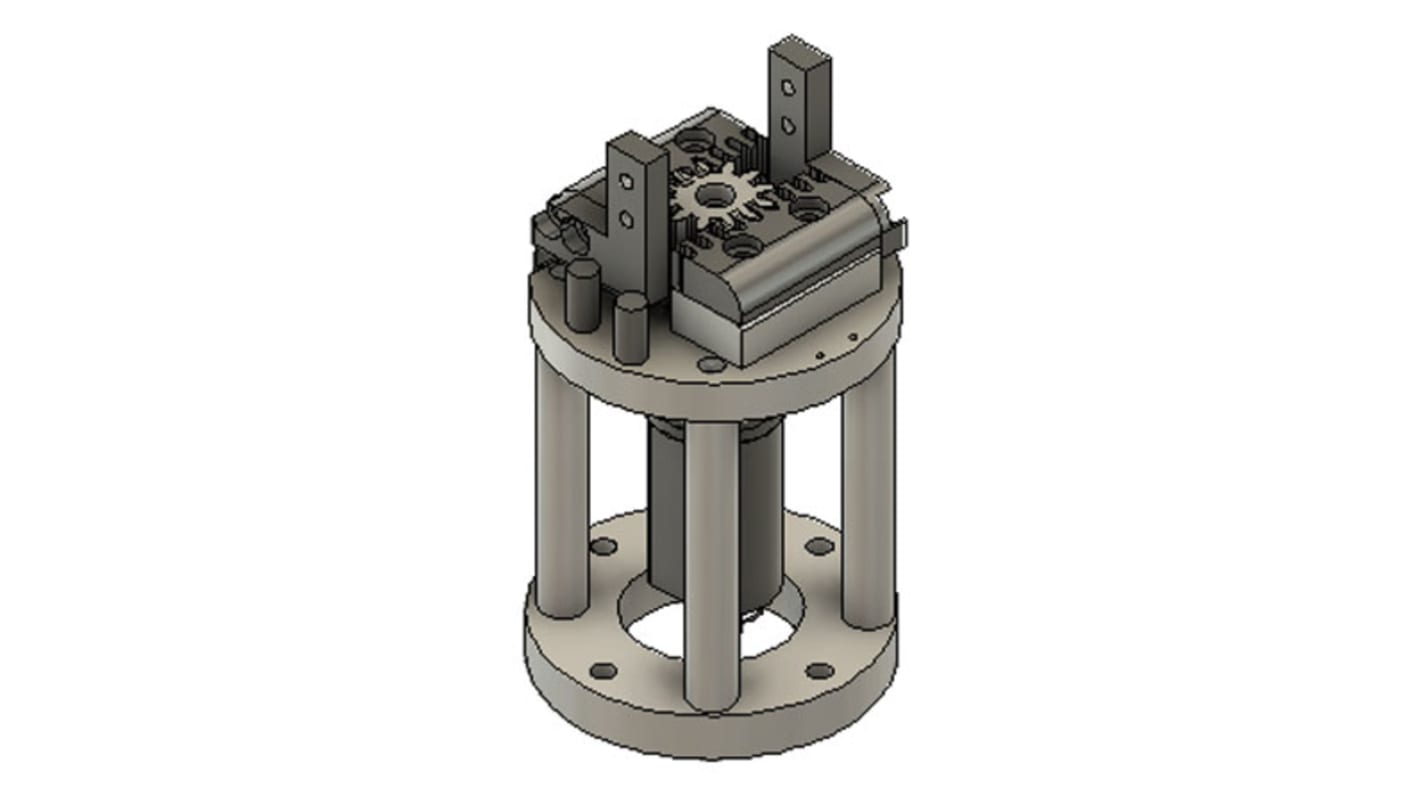
ST Robotics Elektrischer Parallelgreifer EG17
Der Parallelgreifer EG17 für den Roboterarm R17 ist ein mit Gleichstrom betriebener Linear-Parallelgreifer mit großer Reichweite. Die Gewindebohrungen bieten umfassende Anpassungsmöglichkeiten.
Ein Parallelgreifer funktioniert durch Zusammendrücken der beiden Backen in Form von parallelen Greifbewegungen. Die M3-Gewindebohrungen ermöglichen dem Greifer Einstellungen und kundenspezifische Anpassungen mit anderen Anbauteilen.
Ein Parallelgreifer funktioniert durch Zusammendrücken der beiden Backen in Form von parallelen Greifbewegungen. Die M3-Gewindebohrungen ermöglichen dem Greifer Einstellungen und kundenspezifische Anpassungen mit anderen Anbauteilen.
Eigenschaften und Vorteile
• Greifkraft: 20N
• Betriebstemperatur: 0-40 °C
• Gesamthub: 12,5 mm (6,25 mm pro Finger)
• Schließ- bzw. Öffnungszeit: 500 ms
• Betriebstemperatur: 0-40 °C
• Gesamthub: 12,5 mm (6,25 mm pro Finger)
• Schließ- bzw. Öffnungszeit: 500 ms
Informationen zur Produktanwendung
Typische Anwendungen sind Abläufe bei Bestückungsmaschinen, Scannen und Lagern von Gegenständen oder Ausrichtung von Prüflingen auf einem Transportband zur Verbesserung der Fertigungsfähigkeiten.
Technische Daten
Eigenschaft | Wert |
|---|---|
| Greifertyp | Elektrisch |
| Endeffektor | Parallel |
| Anzahl von Fingern | 2 |
| Greifkraft | 20N |
| Hub | 6.25 (per Finger) mm, 12.5mm |
| Schließgeschwindigkeit | 500m/s |