- Home
- >
- InfoZone
- >
- automation
- >
- Messung der Ausgangsspannung von Motorantrieben mit regelbarer Drehzahl
Messung der Ausgangsspannung von Motorantrieben mit regelbarer Drehzahl
Motorantriebe mit regelbarer Drehzahl, auch als Frequenzumrichter bezeichnet, werden immer häufiger in industriellen Anlagen eingesetzt. Bei der Installation und Wartung erhält man bei der Messung der Ausgangsspannungen oft unerwartete Ergebnisse. Woran liegt das, und wie kann man es verhindern?
Motorantriebe mit regelbarer Drehzahl
Bei herkömmlichen elektrischen Maschinen, die direkt an ein ein- oder dreiphasiges Stromversorgungssystem angeschlossen werden, kann die Drehzahl nur in sehr geringem Umfang geregelt werden, wenn überhaupt. Eine mögliche Lösung ist ein externes Getriebe. Dieses ist jedoch im Allgemeinen sperrig, geräuschintensiv, kostspielig und verschleißanfällig. Der Einsatz neuer Halbleiter- Bauelemente, die für hohe Ströme und Spannungen ausgelegt sind, hat den Weg für die Entwicklung so genannter Motorantriebssteuerungen mit regelbarer Drehzahl bzw. „Frequenzumrichter“ frei gemacht. Diese Bauelemente ermöglichen eine Drehzahlsteuerung in einem weiten Bereich und bieten außerdem geringe elektrische Verluste und ein konstantes Drehmoment, das unabhängig von der tatsächlichen Drehzahl der Maschine ist. Infolgedessen setzen sich Motorantriebe mit regelbarer Drehzahl in industriellen Anlagen immer mehr durch, wo sie unter anderem die folgenden Vorteile bieten:
kein Verschleiß, da Asynchronmaschinen eingesetzt werden; effektive Steuerung; hoher Wirkungsgrad.
Bei der Installation und Wartung erhält man jedoch bei der Messung der Ausgangsspannungen oft unerwartete Ergebnisse. Im Folgenden wird erklärt, wie es dazu kommen kann und wie Sie mithilfe eines Messgerätes richtige Messergebnisse erzielen können.
Erzeugung der variablen Ausgangsfrequenz
Es gibt verschiedene Möglichkeiten zur Erzeugung der variablen Ausgangsfrequenz. Die ersten Modelle wurden als selbstgeregelte oder maschinen-synchronisierte Thyristor- Stromrichter bezeichnet. Sie werden heute immer noch in Frequenzumrichtern für hohe Leistungen eingesetzt. Für geringere Leistungen wurden jedoch bessere Alternativen entwickelt.
Thyristoren können nur beim Nulldurchgang des Netzstroms ausgeschaltet werden. Darum ist die Ausgangsspannung dieser Umrichter keine kontinuierliche Sinuskurve, sondern weist immer einen Phasenanschnitt auf (wie z. B. in Abb. 1 dargestellt). Eine Änderung des Phasenwinkels dieses Phasenanschnitts steuert die Ausgangsleistung, wodurch die Maschinendrehzahl geändert und gleichzeitig die verfügbare mechanische Leistung gesenkt werden kann. Leider gestatten diese Umrichter keine beliebige Modulation der Ausgangssignalform.
Auch mit zusätzlichen Schaltkreisen kann dieses Problem nur bedingt gelöst werden, wobei gleichzeitig hohe Kosten entstehen. Das Aufkommen von so genannten abschaltbaren Leistungshalbleitern ermöglichte einen völlig neuen Ansatz zur Drehzahlregelung. Diese Halbleiter können ein- und ausgeschaltet werden, wodurch sie sich für das „Unterbrechen“ in einem Gleichstromsystem eignen. Abb. 2 zeigt den prinzipiellen Aufbau eines solchen Antriebs.
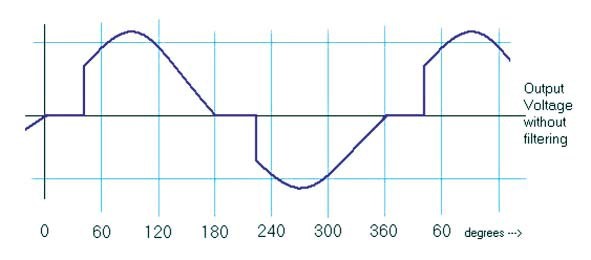 |
Abbildung. 1: Ausgangsspannung eines Thyristor-Umrichters. Die ungefilterte Ausgangsspannung weist deutliche Phasenanschnitte auf.
Der Ein- oder Dreiphasen-Netzeingang ist an eine Reihe von Gleichrichtern angeschlossen, die einen internen DC-Zwischenkreis speisen. Die Gleichspannung wird in einem groß dimensionierten Speicherkondensator gepuffert, der auf eine Spannung Ub aufgeladen wird: Ub = 2*U Netz 1.41*U Netz

Die Gleichspannung wird dann an eine Reihe von doppelseitigen Schaltern angeschlossen, die abwechselnd jeden der drei Maschinenanschlüsse mit der positiven oder negativen Busleitung verbinden. Außerdem kann jede Abzweigung des Schalters in einen inaktiven (d. h. nicht leitenden) Zustand versetzt werden, wodurch der entsprechende Maschinenanschluss potenzialfrei wird.
Die Schalter werden alle von einem zentralen Steuergerät gesteuert, das die Antriebsimpulse erzeugt, mit denen jeder der sechs Schalter zum richtigen Zeitpunkt betätigt wird. Die Schaltgeschwindigkeit ist variabel, und dadurch wird die Ausgangsfrequenz bestimmt. Die Reihenfolge, in der die drei Ausgänge angesteuert werden bestimmt die Drehrichtung der Maschine. Das Steuergerät ist so eingestellt, dass die Ausgangsfrequenz in einem weiten Bereich variiert werden kann. Da die Drehzahl der Maschine direkt von der Versorgungsfrequenz abhängt, kann sie effizient gesteuert werden. Abb. 3 zeigt die resultierenden Ausgangsspannungen für die einzelnen Ausgangsleitungen. An jedem Maschinenanschluss zeigen sich ein positiver Impuls, ein Zeitraum, in dem der Anschluss stromlos ist, dann ein negativer Impuls und wieder ein Zeitraum, in dem keine Antriebsspannung anliegt.
In diesem einfachen Beispiel ist die Leerlauf-Ausgangsspannung an jedem der Ausgänge entweder +1/2 Ub oder null (potenzialfrei) oder –1/2 Ub, wobei Ub die Busspannung ist. Da alle drei Ausgänge auf die gleiche Weise angeschlossen sind, ist der Mittelwert für jeden Ausgang die Hälfte der DC-Busspannung.
Wenn die obige Signalform an einen Tiefpassfilter angelegt würde, würde der Ausgang einer Sinuskurve ähneln, die die gleiche Grundfrequenz hat wie die vom Steuerkreis vorgegebene Rechteckspannung (siehe Abb. 4). Tiefpassfilter, die für die in Motorantrieben anzutreffenden Energieniveaus geeignet sind, wären jedoch sperrig und kostspielig, so dass Alternativen entwickelt wurden.
Abbildung 2: Prinzipieller Aufbau eines Motorantriebs mit regelbarer Drehzahl
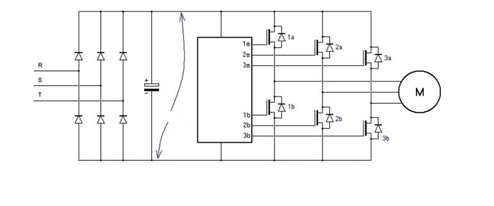
Abbildung 3: Ausgangsspannung für jede Ausgangsleitung
Alternativen zu Tiefpassfiltern
Eine Alternative zu Tiefpassfiltern ergibt sich aus einer weiteren Verbesserung in der Leistungselektronik. In tatsächlich eingesetzten Systemen entstehen die positiven und negativen Impulse normalerweise nicht durch die Erzeugung eines einzigen Impulses mit der gewünschten Polarität. Stattdessen werden alle Impulse dadurch erzeugt, dass man den selben Halbleiterschalter mit einer wesentlich höheren Impulsrate und einem variierenden Tastgrad immer wieder ein- und ausschaltet (siehe Abb. 5).

Abbildung 4: Ausgangsspannung direkt und über einen Tiefpassfilter
Der Trick besteht jetzt darin, den Tastgrad so zu variieren, dass der Strom (aber nicht die Spannung) durch die Maschinenwicklung eine Sinusform hat. Die Induktion der Maschinenwicklungen fungiert dann als Tiefpassfilter, in dem infolge der pulsbreitenmodulierten Spannung ein sinusförmiger Strom fließt.
In Abb. 5 zeigt die obere Kurve die Ausgangsspannung für nur eine Ausgangsleitung, so dass die Auswirkung der Variation des Tastgrads deutlich wird. Die untere Kurve zeigt die effektive Ausgangsspannung pro internem Taktzyklus T auf einer relativen Skala
Dies weist darauf hin, dass die effektive Ausgangsspannung sinusförmig ist. Die tatsächliche Ausgangsspannung des Motorantriebs ähnelt jedoch viel stärker der oberen Kurve! Im Gegensatz zu den oben erwähnten Thyristorschaltungen können die Antriebsschaltungen jetzt durchgängig im Schaltbetrieb verwendet werden. Energieverluste in den Halbleiterschaltern sind daher minimal, was zu hohem Wirkungsgrad und geringer Wärmeentwicklung im Antriebsmodul führt.
Spannungsmessungen
Obwohl die Verbesserungen von Wirkungsgrad und Drehzahlsteuerungsmöglichkeiten bei diesen Motorantrieben offensichtlich sind, ergibt sich für die Installations- und Wartungstechniker ein Problem. Die Ausgangsspannung des Motorantriebs soll über eine induktive Last einen sinusförmigen Strom erzeugen, aber die angelegte Spannung hat eine gänzlich andere Signalform. Eine direkte Messung der Ausgangsspannung kann daher zu unerwarteten Ergebnissen führen, da das als Messgerät verwendete Multimeter im Gegensatz zur Sinuskurve bei Netzfrequenz, d. h. 50 oder 60 Hz, ausgelegt. Die Ausgangsspannung des Antriebs mit regelbarer Drehzahl ist dagegen eine Rechteckwelle mit hoher Frequenz und ständig wechselndem Tastgrad. Die Spitzenamplitude der Rechteckwelle ist dafür unveränderlich. Außerdem müssen auch noch zwei Polaritäten berücksichtigt werden! Die meisten Multimeter reagieren auf die angelegte Spitze- oder Spitze-zu-Spitze- Spannung oder den Mittelwert der Spannung und werden so kalibriert, dass sie den Effektivwert der Amplitude der Sinuskurve anzeigen. Außerdem verwenden die meisten Multimeter für Wechselspannungsmessungen einen zweiphasigen Gleichrichter am Eingang, damit Spannungen mit beiden Polaritäten in gleichem Maße zum Messwert beitragen.
Wenn wir uns die Ausgangsspannung in Abb. 5 ansehen, ist die Durchschnittsspannung pro Zyklus T (nach der Gleichrichtung) direkt proportional zum Tastgrad der Signalform und zur Bus-Gleichspannung und ändert sich daher aufgrund des variierenden Tastgrades laufend. Innerhalb eines Halbzyklus des Ausgangsstroms ist die Durchschnittsspannung dann: Udurchschn. = d * USpitze = d * (1/2 Ub) wobei: d = Tastgrad, der von 0 auf 100 % und zurück wechselt
Der resultierende Messwert in Volt kann beträchtlich von dem erwarteten Wert an den Maschinenklemmen abweichen (wie er z. B. auf einem Display im Motorantrieb selbst angezeigt wird, das die von der internen Steuerelektronik berechnete effektive Ausgangsspannung anzeigt). Um die Möglichkeiten falscher Messwerte zu verdeutlichen, haben wir eine Reihe von Multimetern verschiedener Marken und Modelle getestet, alle unter genau den gleichen Bedingungen, mit dem gleichen Motorantrieb und den gleichen Einstellungen. Die Messwerte (siehe Tabelle 1) schwanken zwischen 143 V und 1000 V.
Richtige Messergebnisse erzielen!
Für die Berechnung der Ausgangsspannung in dieser besonderen Situation muss die spezielle Anwendung des Motorantriebs berücksichtigt werden

Abbildung 5: Ausgangsspannungen für pulsbreitenmodulierte Motorantriebe.
Die Antriebsleistung für elektrische Maschinen wird durch den Strom erzeugt, der durch die Maschinenwicklungen fließt, während die angelegte Spannung im Prinzip nur benötigt wird, um diesen Strom fließen zu lassen. Motorantriebe mit regelbarer Drehzahl machen sich diese Tatsache zu Nutze, indem eine hochfrequente, nicht lineare Spannung angelegt wird. Diese erzeugt einen sinusförmigen Strom in den Maschinenwicklungen, dessen Frequenz durch das Steuergerät bestimmt wird und der die Polarität der Schaltspannung hat.
Zur Berechnung der effektiven Ausgangsspannung muss also nur die Grundschwingungskomponente der angelegten Spannung berücksichtigt werden. Um dies zu erreichen, wird eine große Anzahl von Stichproben der angelegten Spannung genommen und ein detailliertes Abbild der Spannungssignalform im digitalen Speicher des Messgeräts abgelegt, anhand dessen die Grundschwingungskomponente berechnet und angezeigt werden kann.
Das Bildschirmfoto in Abb. 6 zeigt sowohl die Spitze-zu-Spitze-Amplitude als auch die effektive Ausgangs- spannung eines Motorantriebs in den Feldern am oberen Bildschirmrand.
Die effektive Ausgangsfrequenz der angezeigten Signalform kann hier einfach bestimmt werden: Ein einzelner Zyklus dauert etwa 6,3 Divisions, die Zeitachseneinteilung entspricht 5 ms, also dauert ein einzelner Zyklus ungefähr 31,5 ms. Die Ausgangsfrequenz beträgt dann 1 / 31,5 ms = 32 Hz.
Alternativ können die Cursors verwendet werden, um einen Zyklus dieser Ausgangs-Signalform zu markieren, die Frequenz kann dann direkt abgelesen werden.
Genau dies tun die letzten drei in Tabelle 1 aufgeführten Messgeräte. Dazu gehören die Fluke ScopeMeter der Serie 190B und 190C, bei denen alle eingehenden Spannungen mit einer hohen Abtastrate digitalisiert werden und ein digitales Abbild der Signalform für weitere Analysen gespeichert wird.
| Digitalmultimeter-Modell |
Messwert (Vac) |
| 1 | 1001V |
| 2 | 154.2V |
| 3 | 157.6V |
| 4 | 170.1V |
| 5 | 187.1V |
| 6 | 193.6V |
| 7 | 204.3V |
| 8 | 215.3V |
| 9 | 237.93V |
| 10 | 254V |
| Fluke 41B | 143V |
| Fluke 43B | 143.3V |
| Fluke-Serie | 144V |
Tabelle 1: Wechselspannungsmessungen mit verschiedenen Digitalmultimetern
Die ScopeMeter der Serie 190 sind mit einer speziellen Vpwm-Spannungsmessfunktion für solche Anwendungen ausgestattet. Mit dieser Funktion können die ScopeMeter der Serie 190 das digitalisierte Signal analysieren und die Grundschwingungsfrequenz berechnen. Diese hat die gleiche Signalform wie der Ausgangsstrom des Motorantriebs. Anhand dieser Signalform wird dann der Effektivwert berechnet und als Vpwm-Messwert angezeigt.

Abbildung 6: Ausgang eines Motorantriebs
Fazit
Motorantriebe mit regelbarer Drehzahl bieten den Konstrukteuren und Anwendern von Maschinen eine Reihe von Vorteilen. Für den Wartungstechniker und den Installateur des Maschinenantriebs kann die Messung der Ausgangsspannungen und –frequenzen jedoch eine Komplikation darstellen. Nur Messgeräte, die speziell für die Messung dieser Ausgangsspannungen ausgelegt sind, liefern zuverlässige Messwerte, die mit der (berechneten) Anzeige am Motor selbst übereinstimmen.
| Digital multimeter models |
Measured value (Vac) |
| 1 | 10.01V |
| 2 | 154.2V |
| 3 | 157.6V |
| 4 | 170.1V |
| 5 | 187.1V |
| 6 | 193.6V |
| 7 | 204.3V |
| 8 | 215.3V |
| 9 | 237.93V |
| 10 | 254V |
| Fluke 41B | 143V |
| Fluke 43B | 143.3V |
| Fluke Series 190 | 144V |