InvenSense IAM-20680HP Smartmotion Entwicklungstool Sensor für IAM
- RS Best.-Nr.:
- 218-2184
- Herst. Teile-Nr.:
- DK-20680HP
- Marke:
- InvenSense

Derzeit nicht erhältlich
Wir wissen nicht, ob wir diesen Artikel noch einmal auf Lager haben werden. RS beabsichtigt, ihn bald aus dem Sortiment zu nehmen.
- RS Best.-Nr.:
- 218-2184
- Herst. Teile-Nr.:
- DK-20680HP
- Marke:
- InvenSense
Technische Daten
Mehr Infos und technische Dokumente
Rechtliche Anforderungen
Produktdetails
Finden Sie ähnliche Produkte, indem Sie ein oder mehrere Eigenschaften auswählen.
Alle auswählen | Eigenschaft | Wert |
|---|---|---|
| Marke | InvenSense | |
| Produkt Typ | Entwicklungstool Sensor | |
| Vorgestelltes Gerät | IAM-20680HP | |
| Zur Verwendung mit | IAM | |
| Kit-Klassifizierung | Entwicklungskit | |
| Kit-Name | Smartmotion | |
| Normen/Zulassungen | AEC-Q100 | |
| Alle auswählen | ||
|---|---|---|
Marke InvenSense | ||
Produkt Typ Entwicklungstool Sensor | ||
Vorgestelltes Gerät IAM-20680HP | ||
Zur Verwendung mit IAM | ||
Kit-Klassifizierung Entwicklungskit | ||
Kit-Name Smartmotion | ||
Normen/Zulassungen AEC-Q100 | ||
- Ursprungsland:
- TW
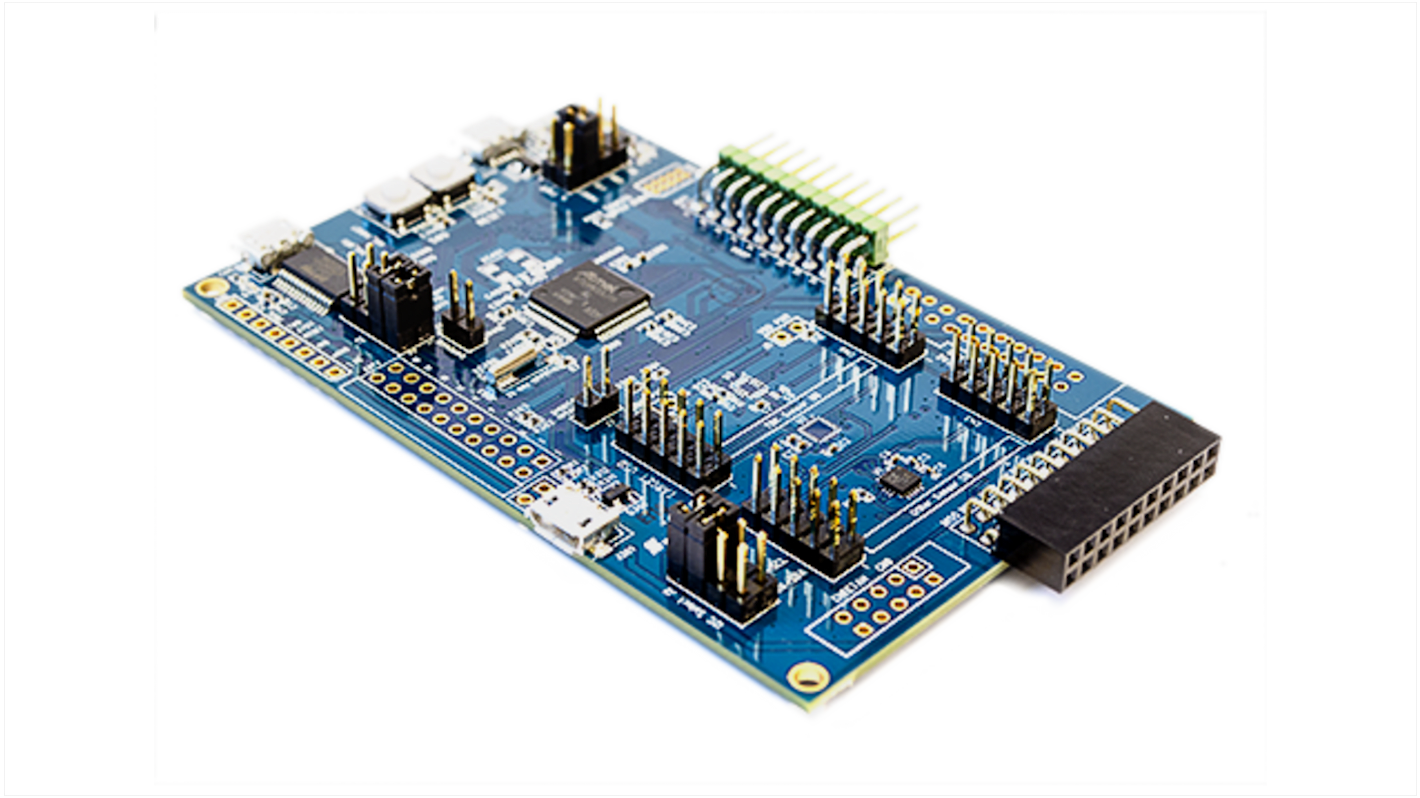
Das InvenSense Smart Motion ist ein Entwicklungskit für IAM - 20680HP, einen MEMS 6-Achsen-Bewegungssensor, der ein 3-Achsen-Gyroskop und einen 3-Achsen-Beschleunigungsmesser kombiniert. Das Entwicklungskit wird mit der erforderlichen Software einschließlich InvenSense Motion Link, einem GUI-basierten Entwicklungstool und integrierten Bewegungstreibern für IAM-20680HP geliefert.
Integrierter integrierter Debugger für Programmierung und Debugging
USB-Steckverbinder für Host-Schnittstelle zur Unterstützung von Software-Debugging und Sensordatenprotokollierung
Platinennetzteil über USB
Sensorfusion
Kalibrierung von Beschleunigungsmesser und Gyroskop
Verwandte Links
- InvenSense IAM-20680 Smartmotion Entwicklungstool Sensor für IAM
- InvenSense ICM-20602 Smartmotion Entwicklungstool Sensor für ICM
- InvenSense ICM-42605 Smartmotion Entwicklungstool Sensor für ICM
- InvenSense ICM-42688-P Smartmotion Entwicklungstool Sensor für ICM
- InvenSense IAM-20680 EV_IAM-20680 Bewegungssensor für IAM
- InvenSense CH101-00ABR Smartsonic Entwicklungstool Sensor für Ch101
- InvenSense CH201-02ABR Smartsonic Entwicklungstool Sensor für Ch201
- InvenSense Bewegungserfassungsgerät 6-Achsen Oberfläche 1.71 V 3.6V I2C/SPI Digital LGA 16-Pin