RS PRO Hybrid 1.8° Schrittmotor 2,54 V, 3,64 V, 5 V / 1,96 A, 2,8 A, 3,92 A 2.3 (Unipolar) nm, 2.8 (Parallel) nm, 2.8
- RS Best.-Nr.:
- 180-5290
- Marke:
- RS PRO

Nicht mehr im Sortiment
Alternative
Dieses Produkt ist derzeit nicht verfügbar. Folgende mögliche Alternative können wir anbieten:

Stück
280,32 €
(ohne MwSt.)
333,58 €
(inkl. MwSt.)
- RS Best.-Nr.:
- 180-5290
- Marke:
- RS PRO
- Ursprungsland:
- CN
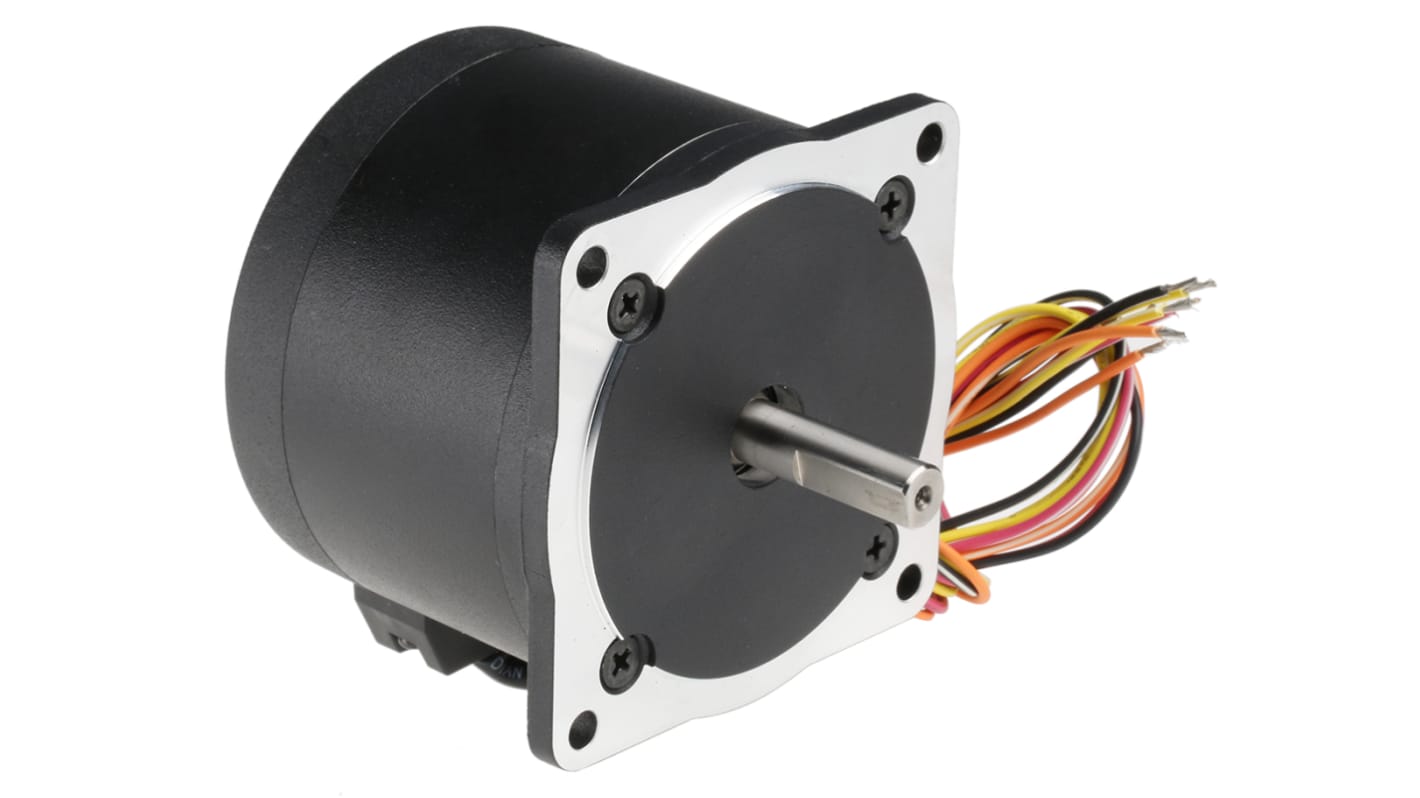
Hybrid-Schrittmotor von RS Pro mit Parallel-, Serien- und Unipolar-Optionen
Hybrid-Schrittmotoren von RS Pro sind Hochleistungs-DC-Motoren, die sich perfekt für Anwendungen eignen, die eine präzise Bewegung oder Drehung in Schritten erfordern. Sie kombinieren Eigenschaften von VR- (Variable Reluktance) Schrittmotoren und PM- (Permanentmagnet) Schrittmotoren und bieten einen vielseitigen Motor, der für eine Vielzahl von Anwendungen geeignet ist. Mit RS Pro Hybrid-Schrittmotoren kann selbst bei niedrigen Drehzahlen ein hohes Drehmoment erreicht werden.
Je nach Art der Anwendung kann diese Serie von Schrittmotoren verschiedene Drehzahlen, Drehmomente und Leistungsausgänge erreichen. Dies kann erreicht werden, indem sie entweder als Serie, parallel oder unipolar verkabelt werden und einen sehr vielseitigen und zuverlässigen Schrittmotor bieten.
Je nach Art der Anwendung kann diese Serie von Schrittmotoren verschiedene Drehzahlen, Drehmomente und Leistungsausgänge erreichen. Dies kann erreicht werden, indem sie entweder als Serie, parallel oder unipolar verkabelt werden und einen sehr vielseitigen und zuverlässigen Schrittmotor bieten.
Eigenschaften und Vorteile
Hybridtechnologie, die VR- und PM-Motoreigenschaften kombiniert
Hohes Drehmoment bei niedriger Drehzahl
Geeignet für eine Vielzahl von Anwendungen
Leichtes und dennoch Durable Design
8-adrige Konfiguration
Haltedrehmoment: 2,3 Nm (unipolar), 2,8 Nm (parallel), 2,8 Nm (Serie)
Schrittwinkel: 1,8°
Nennspannung: 3,64 V (unipolar), 2,54 V (parallel), 5 V (Serie)
Hohes Drehmoment bei niedriger Drehzahl
Geeignet für eine Vielzahl von Anwendungen
Leichtes und dennoch Durable Design
8-adrige Konfiguration
Haltedrehmoment: 2,3 Nm (unipolar), 2,8 Nm (parallel), 2,8 Nm (Serie)
Schrittwinkel: 1,8°
Nennspannung: 3,64 V (unipolar), 2,54 V (parallel), 5 V (Serie)
Anwendungen
Ein Schrittmotor ist eine Art Gleichstrommotor mit einer Welle, die sich in präzisen Schritten dreht, indem er volle Umdrehungen durch mehrere Spulen teilt, die in Phasen organisiert sind. Schrittmotoren sind ideal für Anwendungen, die ein diskretes und präzises Drehmoment oder eine präzise Bewegung erfordern. Diese Motoren bieten eine Vielzahl von Treibermodi einschließlich Wellenantrieb, Vollschritt, Halbschritt und Mikroschritt und können über Schrittsteuerungen betrieben werden. Schrittmotoren werden häufig in Anwendungen wie:
CNC-Maschinen
Medizinische Scanner
Drucker
Laufwerke
Digitalkameras
CNC-Maschinen
Medizinische Scanner
Drucker
Laufwerke
Digitalkameras
Häufig gestellte Fragen
Wie hoch ist die Schrittgeschwindigkeit?
Dieser Schrittmotor hat einen Schrittwinkel von 1,8°, was 200 Schritten pro Umdrehung entspricht.
Wie lang ist die Welle?
Die Länge der Welle beträgt 28,9 mm.
Wie hoch ist die maximale Radialkraft?
Die maximale radiale Kraft für dieses Modell beträgt 220 N (20 mm vom Frontflansch).
Wie hoch ist die maximale Axialkraft?
Die maximale Axialkraft für dieses Modell beträgt 60 N.
Was ist der Unterschied zwischen unipolar und bipolar?
Unipolare Schrittmotoren arbeiten mit einer einzigen Wicklung mit einem Mittelabgriff pro Phase. Jeder Abschnitt der Wicklung wird für jede Richtung des Magnetfeldes eingeschaltet. Im Gegensatz zum unipolaren Schrittmotor hat der bipolare Schrittmotor zwei Leitungen pro Phase, von denen keine gemeinsam ist.
Was sind die Unterschiede zwischen Reihen- und Parallelwicklung?
Motoren können je nach Art der erforderlichen Anwendung als Serie oder parallel verdrahtet werden. Ein Reihenverdrahtungsmotor bietet im Allgemeinen ein erhöhtes Stillstandsdrehmoment, das mit zunehmender Geschwindigkeit abnimmt. Parallel verdrahtete Motoren neigen dazu, ein konstantes Drehmoment bei einer höheren Geschwindigkeit beizubehalten, dies ist jedoch in der Regel niedriger als die Serie.
Die Wicklungskonfiguration oder ein Schrittmotor spielt eine wichtige Rolle bei der Bereitstellung der erforderlichen Betriebsdrehzahl, des erforderlichen Drehmoments und der Steckdose.
Die Wicklungskonfiguration oder ein Schrittmotor spielt eine wichtige Rolle bei der Bereitstellung der erforderlichen Betriebsdrehzahl, des erforderlichen Drehmoments und der Steckdose.
Eigenschaft | Wert |
|---|---|
| Schrittmotor Typ | Hybrid |
| Schrittwinkel | 1.8° |
| Haltemoment | 2.3 (Unipolar) nm, 2.8 (Parallel) nm, 2.8 (Series) nm |
| Anzahl der Kabel | 8 |
| Versorgungsspannung | 2,54 V, 3,64 V, 5 V |
| Baugröße | 82.5 x 82.5mm |
| Schaftdurchmesser | 9.52mm |
| Nennstrom | 1,96 A, 2,8 A, 3,92 A |
| Wicklungsanordnung | Parallel, In Reihe, Unipolar |
| Schaftlänge | 28.9mm |
| Tiefe | 67mm |
| Phasenwiderstand | 0.65 (Parallel) Ω, 1.3 (Unipolar) Ω, 2.6 (Series) Ω |