- Veröffentlicht am 1. Feb. 2023
- Zuletzt bearbeitet am 29. Aug. 2023
- 6 min
Was ist ein Schrittmotor?
In diesem Leitfaden erfahren Sie, was ein Schrittmotor ist, wie er zusammengestellt ist und wie und wo man ihn am besten einsetzt. Lesen Sie, wie Schrittmotoren bei modernen Anwendungen wie 3D Druckern unabdingbar sind.

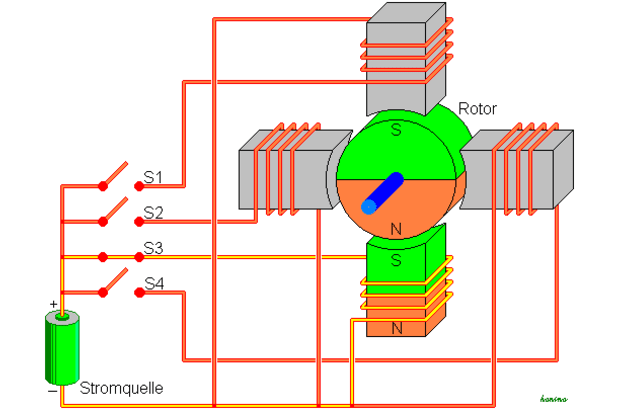
Schrittmotoren sind bürstenlose Synchron-Elektromotoren, die mit Gleichstrom betrieben werden. Herkömmliche bürstenlose Motoren beginnen den Rotor zu drehen, sobald sie mit Strom versorgt werden. Bei Schrittmotoren hingegen bleibt der Rotor in einer bestimmten Position stehen, wenn er mit Strom versorgt wird. Elektro-Impulse werden generiert, um die Statoren zu erregen und damit den Schrittmotor zu drehen. Schrittmotoren benötigen dazu eine digitale Steuerschaltung. Die Reihenfolge, in der die Statoren erregt werden, bestimmt die Drehrichtung. Die Impulse können von einer digitalen Quelle wie einem Computer oder einem Mikrocontroller stammen.
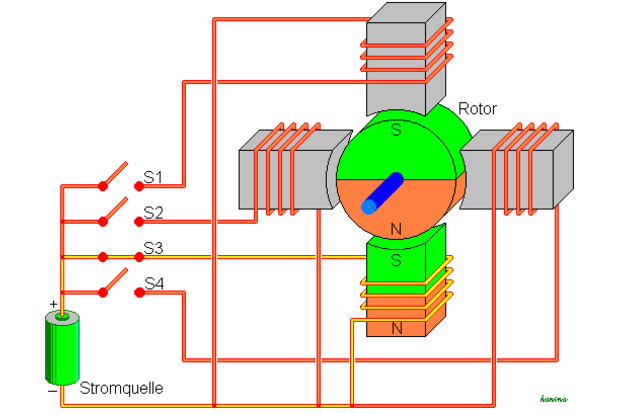
Schrittmotor
Der Mikrocontroller ist in der Regel nicht direkt mit dem Motor verbunden, sondern durch eine elektronische Zwischenschaltung, die Treiber oder Driver genannt wird. Damit werden die Signale des Mikrocontrollers empfangen und umgesetzt, indem der Treiber entsprechende Leistungsimpulse an den Schrittmotor ausgibt.
So werden Schrittmotoren angesteuert
Schrittmotoren haben die Besonderheit, dass sie die Rotorwelle sehr präzise und ohne die Hilfe von Sensoren zur Erfassung der Winkelposition um einige Grade drehen können. Eine vollständige Umdrehung des Motors kann in eine bestimmte Anzahl von Schritten unterteilt werden. Die Anzahl der Schritte wird durch ihre Amplitude, ausgedrückt in Grad, bestimmt. Wenn der Wert beispielsweise 1,8° beträgt, bedeutet dies, dass man 200 Schritte erhält, wenn man den Winkel einer vollständigen Umdrehung (360°) durch 1,8° teilt. Wenn Sie also den Motor um 180° drehen wollten, müssten Sie den Rotor um 100 Schritte drehen. Analog dazu würde ein Vorlauf von 50 Schritten eine Drehung von 90° ergeben.
Der Treiber regelt die Energiemenge, die dem Schrittmotor zugeführt wird. Wird mehr Strom geliefert, so steigt entsprechend die Temperatur. Der Motor und der Treiber können durch den Einsatz von Kühlsystemen bis an ihre Toleranzgrenze gebracht werden. Es gibt zwei Arten der Kühlung von Motoren und Treibern, nämlich die passive und die aktive Kühlung, je nachdem, wie viel Wärme abgeführt werden muss.
Die wahrscheinlich einfachste Methode ist die passive Kühlung: Am Motor wird ein Kühlkörper angebracht, der die Wärme aufnimmt und an die Luft abgibt. Ist die Wärme gering, genügt es, einen einfachen Metallkühlkörper über dem Motor anzubringen. Diese Kühlkörper funktionieren nach einem sehr einfachen Prinzip: Mit ihren Rippen vergrößern sie die Oberfläche, die mit der Luft in Berührung kommt, und leiten so die Wärme schneller ab. Je länger die Rippen sind, desto mehr Wärme wird an die Umgebung abgegeben, und die Kühlung erfolgt schneller und intensiver. Es gibt auch Metallkühlkörper für Treiber, die jedoch kleiner sind.
Wenn eine erhebliche Wärmemenge abgeführt werden muss, kann ein Lüfter hinzugefügt werden, um die passive Kühlung in eine aktive Kühlung umzuwandeln. Das Funktionsprinzip des Lüfters ist einfach zu erklären: Warme Luft, die mit dem Kühlkörper in Berührung kommt, wird ausgeblasen, und kühlere Luft wird zugeführt, damit der Kühlkörper die Wärme besser abführen kann. Ein Lüfter kann direkt an das Stromnetz angeschlossen werden, wobei die Spannung zu berücksichtigen ist.
Typen von Schrittmotoren
Im Stator eines jeden Schrittmotors befinden sich mehrere kreisförmig angeordnete Spulen, die als Elektromagnete wirken. Die vom Hersteller angegebene Anzahl der Phasen entspricht der Anzahl der Spulengruppen, die elektrisch miteinander verbunden sind. Innerhalb jeder Gruppierung sind mehrere Spulenpaare parallel angeordnet. Jedes Spulenpaar ist spiegelbildlich zum Stator angeordnet und elektrisch mit diesem verbunden. Die Spulenpaare sind so angeordnet, dass sich die Phasen überlagern. Wenn also eine Phase mit Strom versorgt wird, werden mehrere Spulen im Motor versorgt.
Je nachdem, wie die Spulen im Motor angeschlossen sind, und je nach Anzahl der Phasen, gibt es eine bestimmte Anzahl von Drähten, die aus dem Motor herauskommen. Bei einem Schrittmotor mit 2 Phasen gibt es zum Beispiel 4 oder 6 Drähte. Die Anzahl der Drähte hängt davon ab, wie der Stromkreis, der die Spulenpaare jeder Phase verbindet, konfiguriert ist. Die einpolige Konfiguration ist die einfachste und zeichnet sich durch einen Stromkreis aus, der aus zwei Leitern pro Phase besteht. Die Leiter (Drähte) führen in den Motor und speisen die Spulenpaare der Phasen. Die Spulen sind in Reihe geschaltet. Im Gegensatz dazu verwendet die bipolare Konfiguration drei Leiter pro Phase. Die Konfiguration ähnelt der unipolaren Konfiguration, mit dem Unterschied, dass zwischen jeder Spule ein zusätzlicher Leiter liegt (ebenfalls in Reihe angeordnet).
Hybride Schrittmotoren ermöglichen eine höhere Präzision durch Techniken wie Half Stepping und Microstepping. Damit kann man die festgelegte Anzahl von Schritten, die ein Motor zurücklegen kann, erhöhen: Der Treiber wird so programmiert, dass er abwechselndeSinus-/Cosinus-Wellenformen an die Spulen sendet. Der Schrittmotor kann sich somit regelmäßiger und schneller drehen als in einer Standardkonfiguration.
Bei Hybrid-Schrittmotoren sind die Zähne in der Regel von der Außenseite des Rotors versetzt. Dies bedeutet auch, dass Schritte und Umdrehungen präziser gesteuert werden können. Außerdem bieten sie einen leiseren Betrieb, ein höheresDrehmoment und eine höhere Geschwindigkeit als Standard-Schrittmotoren.
Wo werden Schrittmotoren eingebaut?
Der Schrittmotor ist ideal für Anwendungen, bei denen eine präzise Positionierung erforderlich ist oder bei denen die Last ohne Vibrationen in Position gehalten werden muss. Im Verbraucherbereich werden kleine Schrittmotoren für Drucker, Scanner oder Plotter oder für die Bewegung von Videoüberwachungskameras verwendet. Sie werden auch in der Büroautomation eingesetzt, zum Beispiel in Banknoten- oder Schecklesern. Schrittmotoren sind in der Industrie häufig anzutreffen, da sie im Allgemeinen die Automatisierung der Maschinenproduktion ermöglichen. Überall dort, wo Bewegungen gesteuert werden müssen, von Etikettiermaschinen über CNC-Maschinen bis hin zu Robotern, sind Schrittmotoren unverzichtbar. Schrittmotoren werden auch extern eingesetzt, zum Beispiel in Photovoltaikanlagen, damit die Ausrichtung der Solarmodule ständig automatisch angepasst werden kann, um den Energieertrag zu optimieren.
3D-Drucker
Jeder 3D-Drucker benötigt einen hochwertigen Schrittmotor, um den Extruder mit angemessener Präzision und Geschwindigkeit zu steuern. Der Schrittmotor bestimmt auch die Gesamtleistung, die Temperatur und letztlich die Betriebslautstärke des Druckers. Die so genannten "Silent-Stepper-Treiber" werden häufig als Upgrade verwendet, um den herkömmlichen Schrittmotor zu ersetzen und so die Geräuschentwicklung beim Drucken deutlich zu reduzieren.

Schrittmotoren werden im 3D-Druck eingesetzt, weil sie leistungsstark sind, mit niedrigen Geschwindigkeiten und mit extremer Präzision arbeiten und sich daher ideal für die Herstellung hoch definierter Objekte eignen. Aufgrund ihrer hohen Arbeitsleistung sind 3D-Drucker auf die Kühlung von Schrittmotoren angewiesen (siehe oben).
Zusammenfassung: Schrittmotor
Das Besondere an Schrittmotoren ist also, wie der Name es bereits andeutet, dass sie die Rotorwelle sehr präzise und ohne die Hilfe von Sensoren zur Erfassung der Winkelposition um einige Grade drehen können. Eine vollständige Umdrehung des Motors kann dann in eine bestimmte Anzahl von Schritten unterteilt werden. Schrittmotoren werden also vorwiegend dann eingesetzt, wenn besondere Genauigkeit und eine präzise Positionierung gefragt ist. Insbesondere bei Anwendungen wie 3D Druckern sind sie demnach unabdingbar.
3D-Druck ist Ihr Thema? Dann werfen Sie jetzt einen Blick in den 3D-Drucker-Einkaufsführer 2022 und erfahren Sie mehr über die besten Drucker für Einsteiger und Fortgeschrittene.